进程
一 什么是进程
进程:正在进行的一个过程或者说一个任务。而负责执行任务则是cpu。
举例(单核+多道,实现多个进程的并发执行):
jack在一个时间段内有很多任务要做:python备课的任务,写书的任务,交女朋友的任务,王者荣耀上分的任务,
但jack同一时刻只能做一个任务(cpu同一时间只能干一个活),如何才能玩出多个任务并发执行的效果?
jack备一会课,再去跟李杰的女朋友聊聊天,再去打一会王者荣耀….这就保证了每个任务都在进行中
二 进程与程序的区别
程序仅仅只是一堆代码而已,而进程指的是程序的运行过程。
举例:
想象一位有一手好厨艺的计算机科学家jack正在为他的女儿元昊烘制生日蛋糕。
他有做生日蛋糕的食谱,
厨房里有所需的原料:面粉、鸡蛋、韭菜,蒜泥等。
在这个比喻中:
做蛋糕的食谱就是程序(即用适当形式描述的算法)
计算机科学家就是处理器(cpu)
而做蛋糕的各种原料就是输入数据。
进程就是厨师阅读食谱、取来各种原料以及烘制蛋糕等一系列动作的总和。
现在假设计算机科学家jack的儿子rose哭着跑了进来,说:XXXXXXXXXXXXXX
科学家jack想了想,处理儿子rose蛰伤的任务比给女儿元昊做蛋糕的任务更重要,于是
计算机科学家就记录下他照着食谱做到哪儿了(保存进程的当前状态),然后拿出一本急救手册,按照其中的指示处理蛰伤。这里,我们看到处理机从一个进程(做蛋糕)切换到另一个高优先级的进程(实施医疗救治),每个进程拥有各自的程序(食谱和急救手册)。当蜜蜂蛰伤处理完之后,这位计算机科学家又回来做蛋糕,从他
离开时的那一步继续做下去。
需要强调的是:同一个程序执行两次,那也是两个进程,比如打开暴风影音,虽然都是同一个软件,但是一个可以播放苍井空,一个可以播放饭岛爱。
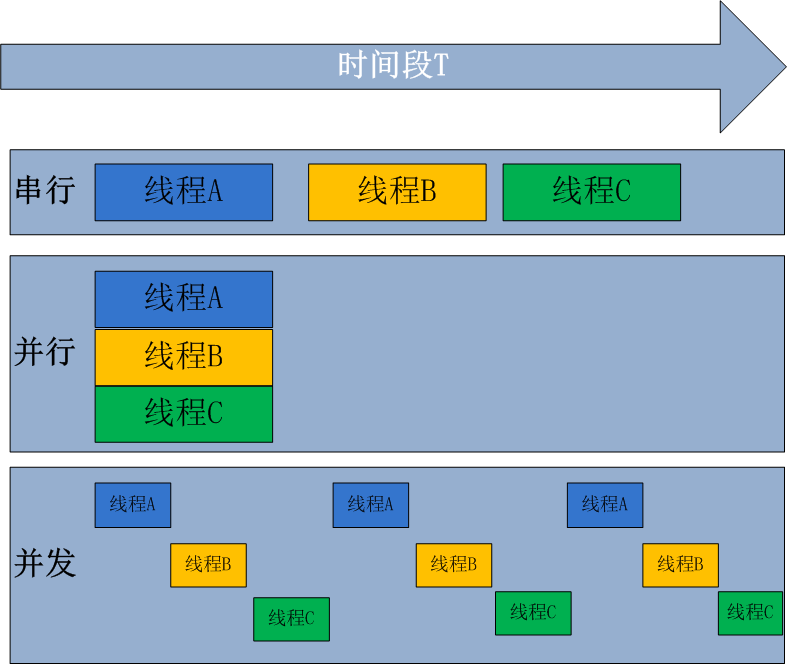
三 并发与并行
无论是并行还是并发,在用户看来都是’同时’运行的,不管是进程还是线程,都只是一个任务而已,真是干活的是cpu,cpu来做这些任务,而一个cpu同一时刻只能执行一个任务
一 并发:是伪并行,即看起来是同时运行。单个cpu+多道技术就可以实现并发,(并行也属于并发)
单cpu,多进程,并发举例一:
1 | 你是一个cpu,你同时谈了三个女朋友,每一个都可以是一个恋爱任务,你被这三个任务共享 |
单cpu,多进程,并发举例二:
1 | 某天下午,egon,yuanhao,wupeiqi,alex约好了一起去嫖娼,但娼只有一个,cpu只有一个,但是却要‘同时’干 |
二 并行:同时运行,只有具备多个cpu才能实现并行
单核下,可以利用多道技术,多个核,每个核也都可以利用多道技术(多道技术是针对单核而言的)
有四个核,六个任务,这样同一时间有四个任务被执行,假设分别被分配给了cpu1,cpu2,cpu3,cpu4,
一旦任务1遇到I/O就被迫中断执行,此时任务5就拿到cpu1的时间片去执行,这就是单核下的多道技术
而一旦任务1的I/O结束了,操作系统会重新调用它(需知进程的调度、分配给哪个cpu运行,由操作系统说了算),可能被分配给四个cpu中的任意一个去执行
所有现代计算机经常会在同一时间做很多件事,一个用户的PC(无论是单cpu还是多cpu),都可以同时运行多个任务(一个任务可以理解为一个进程)。
启动一个进程来杀毒(360软件)
启动一个进程来看电影(暴风影音)
启动一个进程来聊天(腾讯QQ)
所有的这些进程都需被管理,于是一个支持多进程的多道程序系统是至关重要的
多道技术概念回顾:内存中同时存入多道(多个)程序,cpu从一个进程快速切换到另外一个,使每个进程各自运行几十或几百毫秒,这样,虽然在某一个瞬间,一个cpu只能执行一个任务,但在1秒内,cpu却可以运行多个进程,这就给人产生了并行的错觉,即伪并发,以此来区分多处理器操作系统的真正硬件并行(多个cpu共享同一个物理内存)
线程
一 什么是线程
在传统操作系统中,每个进程有一个地址空间,而且默认就有一个控制线程
线程顾名思义,就是一条流水线工作的过程,一条流水线必须属于一个车间,一个车间的工作过程是一个进程
车间负责把资源整合到一起,是一个资源单位,而一个车间内至少有一个流水线
流水线的工作需要电源,电源就相当于cpu
所以,进程只是用来把资源集中到一起(进程只是一个资源单位,或者说资源集合),而线程才是cpu上的执行单位。
多线程(即多个控制线程)的概念是,在一个进程中存在多个控制线程,多个控制线程共享该进程的地址空间,相当于一个车间内有多条流水线,都共用一个车间的资源。
例如,北京地铁与上海地铁是不同的进程,而北京地铁里的13号线是一个线程,北京地铁所有的线路共享北京地铁所有的资源,比如所有的乘客可以被所有线路拉。
二 线程的创建开销小
创建进程的开销要远大于线程?
如果我们的软件是一个工厂,该工厂有多条流水线,流水线工作需要电源,电源只有一个即cpu(单核cpu)
一个车间就是一个进程,一个车间至少一条流水线(一个进程至少一个线程)
创建一个进程,就是创建一个车间(申请空间,在该空间内建至少一条流水线)
而建线程,就只是在一个车间内造一条流水线,无需申请空间,所以创建开销小
进程之间是竞争关系,线程之间是协作关系?
车间直接是竞争/抢电源的关系,竞争(不同的进程直接是竞争关系,是不同的程序员写的程序运行的,迅雷抢占其他进程的网速,360把其他进程当做病毒干死)
一个车间的不同流水线式协同工作的关系(同一个进程的线程之间是合作关系,是同一个程序写的程序内开启动,迅雷内的线程是合作关系,不会自己干自己)
三 线程与进程的区别
1 | Threads share the address space of the process that created it; processes have their own address space. |
四 为何要用多线程
多线程指的是,在一个进程中开启多个线程,简单的讲:如果多个任务共用一块地址空间,那么必须在一个进程内开启多个线程。详细的讲分为4点:
多线程共享一个进程的地址空间
线程比进程更轻量级,线程比进程更容易创建可撤销,在许多操作系统中,创建一个线程比创建一个进程要快10-100倍,在有大量线程需要动态和快速修改时,这一特性很有用
若多个线程都是cpu密集型的,那么并不能获得性能上的增强,但是如果存在大量的计算和大量的I/O处理,拥有多个线程允许这些活动彼此重叠运行,从而会加快程序执行的速度。
在多cpu系统中,为了最大限度的利用多核,可以开启多个线程,比开进程开销要小的多。(这一条并不适用于python)
进程与线程总结
进程:最小的资源管理单位(盛放线程的容器)
线程:最小的执行单位
Cpython因为同一时刻同一进程只有一个线程被执行,所以python没有线程的并行,只能进程并行
threading模块介绍
multiprocess模块的完全模仿了threading模块的接口,二者在使用层面,有很大的相似性,因而不再详细介绍
开启线程的两种方式
Thread类直接创建
1 | from threading import Thread |
Thread类继承式创建
1 | from threading import Thread |
Thread类的实例方法
join():在子线程完成运行之前,这个子线程的父线程将一直被阻塞(join写在start之后)
setDaemon(True):
将线程声明为守护线程,必须在start() 方法调用之前设置,如果不设置为守护线程程序会被无限挂起。
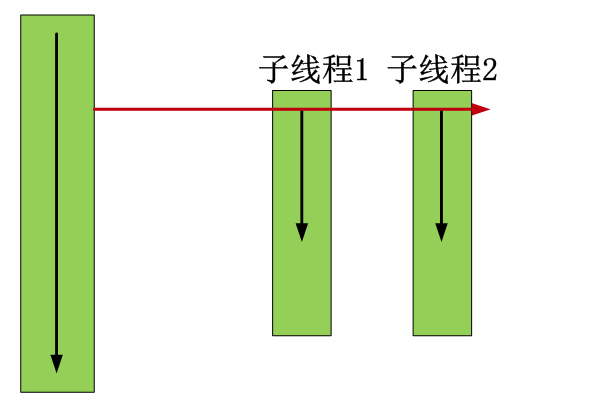
当我们在程序运行中,执行一个主线程,如果主线程又创建一个子线程,主线程和子线程 就分兵两路,分别运行,那么当主线程完成想退出时,会检验子线程是否完成。如果子线程未完成,则主线程会等待子线程完成后再退出。但是有时候我们需要的是只要主线程完成了,不管子线程是否完成,都要和主线程一起退出,这时就可以 用setDaemon方法啦
当主线程执行完,要等非守护线程完成,而此时守护线程并没有死,等待的过程中可以执行
1 | import threading |
daemon
1 | A boolean value indicating whether this thread is a daemon thread (True) or not (False). This must be set before start() is called, otherwise RuntimeError is raised. Its initial value is inherited from the creating thread; the main thread is not a daemon thread and therefore all threads created in the main thread default to daemon = False. |
当daemon被设置为True时,如果主线程退出,那么子线程也将跟着退出,(注意退出不是死,)
反之,子线程将继续运行,直到正常退出。
Thread实例对象的方法
isAlive(): 返回线程是否活动的。
getName(): 返回线程名。
setName(): 设置线程名。
threading模块提供的一些方法:
threading.currentThread(): 返回当前的线程变量。
threading.enumerate(): 返回一个包含正在运行的线程的list。正在运行指线程启动后、结束前,不包括启动前和终止后的线程。
threading.activeCount(): 返回正在运行的线程数量,与len(threading.enumerate())有相同的结果。
GIL
1 | 定义: |
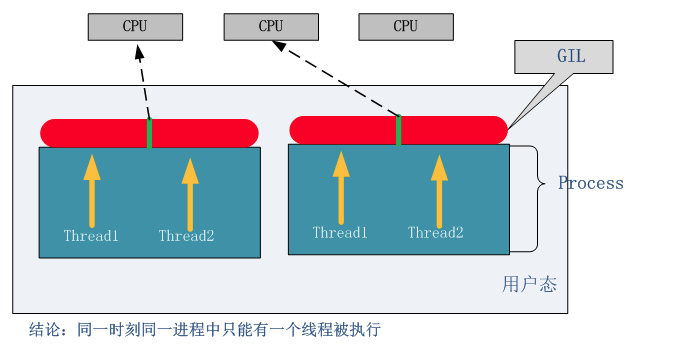
Python中的线程是操作系统的原生线程,Python虚拟机使用一个全局解释器锁(Global Interpreter Lock)来互斥线程对Python虚拟机的使用。为了支持多线程机制,一个基本的要求就是需要实现不同线程对共享资源访问的互斥,所以引入了GIL。
GIL:在一个线程拥有了解释器的访问权之后,其他的所有线程都必须等待它释放解释器的访问权,即使这些线程的下一条指令并不会互相影响。
在调用任何Python C API之前,要先获得GIL
GIL缺点:多处理器退化为单处理器;优点:避免大量的加锁解锁操作
GIL的早期设计
Python支持多线程,而解决多线程之间数据完整性和状态同步的最简单方法自然就是加锁。 于是有了GIL这把超级大锁,而当越来越多的代码库开发者接受了这种设定后,他们开始大量依赖这种特性(即默认python内部对象是thread-safe的,无需在实现时考虑额外的内存锁和同步操作)。慢慢的这种实现方式被发现是蛋疼且低效的。但当大家试图去拆分和去除GIL的时候,发现大量库代码开发者已经重度依赖GIL而非常难以去除了。有多难?做个类比,像MySQL这样的“小项目”为了把Buffer Pool Mutex这把大锁拆分成各个小锁也花了从5.5到5.6再到5.7多个大版为期近5年的时间,并且仍在继续。MySQL这个背后有公司支持且有固定开发团队的产品走的如此艰难,那又更何况Python这样核心开发和代码贡献者高度社区化的团队呢?
GIL的影响
无论你启多少个线程,你有多少个cpu, Python在执行一个进程的时候会淡定的在同一时刻只允许一个线程运行。
所以,python是无法利用多核CPU实现多线程的。
这样,python对于计算密集型的任务开多线程的效率甚至不如串行(没有大量切换),但是,对于IO密集型的任务效率还是有显著提升的。
计算密集型:
1 | #coding:utf8 |
解决方案
用multiprocessing替代Thread multiprocessing库的出现很大程度上是为了弥补thread库因为GIL而低效的缺陷。它完整的复制了一套thread所提供的接口方便迁移。唯一的不同就是它使用了多进程而不是多线程。每个进程有自己的独立的GIL,因此也不会出现进程之间的GIL争抢。
1 | #coding:utf8 |
当然multiprocessing也不是万能良药。它的引入会增加程序实现时线程间数据通讯和同步的困难。就拿计数器来举例子,如果我们要多个线程累加同一个变量,对于thread来说,申明一个global变量,用thread.Lock的context包裹住三行就搞定了。而multiprocessing由于进程之间无法看到对方的数据,只能通过在主线程申明一个Queue,put再get或者用share memory的方法。这个额外的实现成本使得本来就非常痛苦的多线程程序编码,变得更加痛苦了。
总结:因为GIL的存在,只有IO Bound场景下得多线程会得到较好的性能 - 如果对并行计算性能较高的程序可以考虑把核心部分也成C模块,或者索性用其他语言实现 - GIL在较长一段时间内将会继续存在,但是会不断对其进行改进。
所以对于GIL,既然不能反抗,那就学会去享受它吧!
总结:
GIL(全局解释器锁)
加在cpython解释器上:
计算密集型:一直在使用cpu
IO:存在大量IO操作
对于算计密集型任务:python的多线程没有用
对于IO密集型任务:python的多线程有意义的
python使用多核:多个进程,弊端:开销大而且切换复杂
着重点:协程+多进程
方向:IO多路复用
终极思路:换c模块实现多线程
同步锁 (Lock)
1 | import time |
锁通常被用来实现对共享资源的同步访问。为每一个共享资源创建一个Lock对象,当你需要访问该资源时,调用acquire方法来获取锁对象(如果其它线程已经获得了该锁,则当前线程需等待其被释放),待资源访问完后,再调用release方法释放锁:
1 | import threading |
扩展思考
1、为什么有了GIL,还需要线程同步?
多线程环境下必须存在资源的竞争,那么如何才能保证同一时刻只有一个线程对共享资源进行存取?
加锁, 对, 加锁可以保证存取操作的唯一性, 从而保证同一时刻只有一个线程对共享数据存取.
通常加锁也有2种不同的粒度的锁:
coarse-grained(粗粒度): python解释器层面维护着一个全局的锁机制,用来保证线程安全。
内核级通过GIL实现的互斥保护了内核的共享资源。
fine-grained(细粒度): 那么程序员需要自行地加,解锁来保证线程安全,
用户级通过自行加锁保护的用户程序的共享资源。
2、GIL为什么限定在一个进程上?
你写一个py程序,运行起来本身就是一个进程,这个进程是有解释器来翻译的,所以GIL限定在当前进程;
如果又创建了一个子进程,那么两个进程是完全独立的,这个字进程也是有python解释器来运行的,所以
这个子进程上也是受GIL影响的
死锁与递归锁
所谓死锁: 是指两个或两个以上的进程或线程在执行过程中,因争夺资源而造成的一种互相等待的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁,这些永远在互相等待的进程称为死锁进程。
1 | import threading |
在Python中为了支持在同一线程中多次请求同一资源,python提供了可重入锁RLock。这个RLock内部维护着一个Lock和一个counter变量,counter记录了acquire的次数,从而使得资源可以被多次require。直到一个线程所有的acquire都被release,其他的线程才能获得资源。上面的例子如果使用RLock代替Lock,则不会发生死锁:
1 | mutex=threading.RLock() |
Event对象
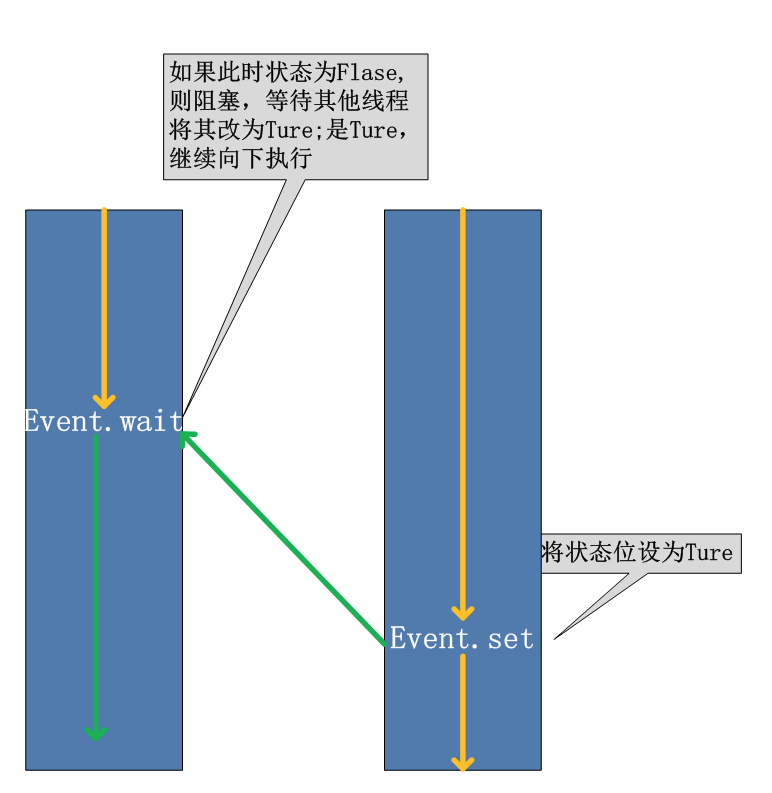
线程的一个关键特性是每个线程都是独立运行且状态不可预测。如果程序中的其 他线程需要通过判断某个线程的状态来确定自己下一步的操作,这时线程同步问题就 会变得非常棘手。为了解决这些问题,我们需要使用threading库中的Event对象。 对象包含一个可由线程设置的信号标志,它允许线程等待某些事件的发生。在 初始情况下,Event对象中的信号标志被设置为假。如果有线程等待一个Event对象, 而这个Event对象的标志为假,那么这个线程将会被一直阻塞直至该标志为真。一个线程如果将一个Event对象的信号标志设置为真,它将唤醒所有等待这个Event对象的线程。如果一个线程等待一个已经被设置为真的Event对象,那么它将忽略这个事件, 继续执行
event.isSet():返回event的状态值;
event.wait():如果 event.isSet()==False将阻塞线程;
event.set(): 设置event的状态值为True,所有阻塞池的线程激活进入就绪状态, 等待操作系统调度;
event.clear():恢复event的状态值为False
可以考虑一种应用场景(仅仅作为说明),例如,我们有多个线程从Redis队列中读取数据来处理,这些线程都要尝试去连接Redis的服务,一般情况下,如果Redis连接不成功,在各个线程的代码中,都会去尝试重新连接。如果我们想要在启动时确保Redis服务正常,才让那些工作线程去连接Redis服务器,那么我们就可以采用threading.Event机制来协调各个工作线程的连接操作:主线程中会去尝试连接Redis服务,如果正常的话,触发事件,各工作线程会尝试连接Redis服务。
1 | import threading |
threading.Event的wait方法还接受一个超时参数,默认情况下如果事件一致没有发生,wait方法会一直阻塞下去,而加入这个超时参数之后,如果阻塞时间超过这个参数设定的值之后,wait方法会返回。对应于上面的应用场景,如果Redis服务器一致没有启动,我们希望子线程能够打印一些日志来不断地提醒我们当前没有一个可以连接的Redis服务,我们就可以通过设置这个超时参数来达成这样的目的:
1 | def worker(event): |
这样,我们就可以在等待Redis服务启动的同时,看到工作线程里正在等待的情况。
Semaphore(信号量)
Semaphore管理一个内置的计数器,
每当调用acquire()时内置计数器-1;
调用release() 时内置计数器+1;
计数器不能小于0;当计数器为0时,acquire()将阻塞线程直到其他线程调用release()。
实例:(同时只有5个线程可以获得semaphore,即可以限制最大连接数为5):
1 | import threading |
队列(queue)
get与put方法
创建一个“队列”对象
1 | import Queue |
Queue.Queue类即是一个队列的同步实现。队列长度可为无限或者有限。可通过Queue的构造函数的可选参数
maxsize来设定队列长度。如果maxsize小于1就表示队列长度无限。
将一个值放入队列中
1 | q.put(10) |
调用队列对象的put()方法在队尾插入一个项目。put()有两个参数,第一个item为必需的,为插入项目的值;
第二个block为可选参数,默认为
1。如果队列当前为空且block为1,put()方法就使调用线程暂停,直到空出一个数据单元。如果block为0,
put方法将引发Full异常。
将一个值从队列中取出
1 | q.get() |
调用队列对象的get()方法从队头删除并返回一个项目。可选参数为block,默认为True。如果队列为空且
block为True,get()就使调用线程暂停,直至有项目可用。如果队列为空且block为False,队列将引发Empty异常。
join与task_done方法
join() 阻塞进程,直到所有任务完成,需要配合另一个方法task_done
1 | def join(self): |
task_done() 表示某个任务完成。每一条get语句后需要一条task_done
1 | import queue |
其他常用方法
此包中的常用方法(q = Queue.Queue()):
q.qsize() 返回队列的大小
q.empty() 如果队列为空,返回True,反之False
q.full() 如果队列满了,返回True,反之False
q.full 与 maxsize 大小对应
q.get([block[, timeout]]) 获取队列,timeout等待时间
q.get_nowait() 相当q.get(False)非阻塞
q.put(item) 写入队列,timeout等待时间
q.put_nowait(item) 相当q.put(item, False)
q.task_done() 在完成一项工作之后,q.task_done() 函数向任务已经完成的队列发送一个信号
q.join() 实际上意味着等到队列为空,再执行别的操作
其他模式
Python Queue模块有三种队列及构造函数:
1、Python Queue模块的FIFO队列先进先出。 class queue.Queue(maxsize)
2、LIFO类似于堆,即先进后出。 class queue.LifoQueue(maxsize)
3、还有一种是优先级队列级别越低越先出来。 class queue.PriorityQueue(maxsize)
1 | import queue |
生产者消费者模型
在线程世界里,生产者就是生产数据的线程,消费者就是消费数据的线程。在多线程开发当中,如果生产者处理速度很快,而消费者处理速度很慢,那么生产者就必须等待消费者处理完,才能继续生产数据。同样的道理,如果消费者的处理能力大于生产者,那么消费者就必须等待生产者。为了解决这个问题于是引入了生产者和消费者模式。
生产者消费者模式是通过一个容器来解决生产者和消费者的强耦合问题。生产者和消费者彼此之间不直接通讯,而通过阻塞队列来进行通讯,所以生产者生产完数据之后不用等待消费者处理,直接扔给阻塞队列,消费者不找生产者要数据,而是直接从阻塞队列里取,阻塞队列就相当于一个缓冲区,平衡了生产者和消费者的处理能力。
这就像,在餐厅,厨师做好菜,不需要直接和客户交流,而是交给前台,而客户去饭菜也不需要不找厨师,直接去前台领取即可,这也是一个结耦的过程。
1 | import time,random |
multiprocessing模块
1 | Multiprocessing is a package that supports spawning processes using an API similar to the threading module. The multiprocessing package offers both local and remote concurrency,effectively side-stepping the Global Interpreter Lock by using subprocesses instead of threads. Due to this, the multiprocessing module allows the programmer to fully leverage multiple processors on a given machine. It runs on both Unix and Windows. |
由于GIL的存在,python中的多线程其实并不是真正的多线程,如果想要充分地使用多核CPU的资源,在python中大部分情况需要使用多进程。
multiprocessing包是Python中的多进程管理包。与threading.Thread类似,它可以利用multiprocessing.Process对象来创建一个进程。该进程可以运行在Python程序内部编写的函数。该Process对象与Thread对象的用法相同,也有start(), run(), join()的方法。此外multiprocessing包中也有Lock/Event/Semaphore/Condition类 (这些对象可以像多线程那样,通过参数传递给各个进程),用以同步进程,其用法与threading包中的同名类一致。所以,multiprocessing的很大一部份与threading使用同一套API,只不过换到了多进程的情境。
python的进程调用
1 | # Process类调用 |
process类
构造方法:
Process([group [, target [, name [, args [, kwargs]]]]])
group: 线程组,目前还没有实现,库引用中提示必须是None;
target: 要执行的方法;
name: 进程名;
args/kwargs: 要传入方法的参数。
实例方法:
is_alive():返回进程是否在运行。
join([timeout]):阻塞当前上下文环境的进程程,直到调用此方法的进程终止或到达指定的timeout(可选参数)。
start():进程准备就绪,等待CPU调度
run():strat()调用run方法,如果实例进程时未制定传入target,这star执行t默认run()方法。
terminate():不管任务是否完成,立即停止工作进程
属性:
daemon:和线程的setDeamon功能一样
name:进程名字
pid:进程号
1 | from multiprocessing import Process |
协程
协程,又称微线程,纤程。英文名Coroutine。一句话说明什么是线程:协程是一种用户态的轻量级线程。
协程拥有自己的寄存器上下文和栈。协程调度切换时,将寄存器上下文和栈保存到其他地方,在切回来的时候,恢复先前保存的寄存器上下文和栈。因此:
协程能保留上一次调用时的状态(即所有局部状态的一个特定组合),每次过程重入时,就相当于进入上一次调用的状态,换种说法:进入上一次离开时所处逻辑流的位置。
yield与协程
1 | import time |
greenlet
Greenlet是python的一个C扩展,来源于Stackless python,旨在提供可自行调度的‘微线程’, 即协程。generator实现的协程在yield value时只能将value返回给调用者(caller)。 而在greenlet中,target.switch(value)可以切换到指定的协程(target), 然后yield value。greenlet用switch来表示协程的切换,从一个协程切换到另一个协程需要显式指定。
greenlet的安装很简单:pip install greenlet 即可,安装好了之后我们来看一个官方的例子
1 | from greenlet import greenlet |
输出为:12 56 34
当创建一个greenlet时,首先初始化一个空的栈, switch到这个栈的时候,会运行在greenlet构造时传入的函数(首先在test1中打印 12), 如果在这个函数(test1)中switch到其他协程(到了test2 打印34),那么该协程会被挂起,等到切换回来(在test2中切换回来 打印34)。当这个协程对应函数执行完毕,那么这个协程就变成dead状态。
注意 上面没有打印test2的最后一行输出 78,因为在test2中切换到gr1之后挂起,但是没有地方再切换回来。这个可能造成泄漏,后面细说。
基于greenlet的框架
gevent模块实现协程
Python通过yield提供了对协程的基本支持,但是不完全。而第三方的gevent为Python提供了比较完善的协程支持。
gevent是第三方库,通过greenlet实现协程,其基本思想是:
当一个greenlet遇到IO操作时,比如访问网络,就自动切换到其他的greenlet,等到IO操作完成,再在适当的时候切换回来继续执行。由于IO操作非常耗时,经常使程序处于等待状态,有了gevent为我们自动切换协程,就保证总有greenlet在运行,而不是等待IO。
由于切换是在IO操作时自动完成,所以gevent需要修改Python自带的一些标准库,这一过程在启动时通过monkey patch完成:
1 | import gevent |
当然,实际代码里,我们不会用gevent.sleep()去切换协程,而是在执行到IO操作时,gevent自动切换,代码如下:
1 | from gevent import monkey |
IO模型
同步(synchronous) IO和异步(asynchronous) IO,阻塞(blocking) IO和非阻塞(non-blocking)IO分别是什么,到底有什么区别?这个问题其实不同的人给出的答案都可能不同,比如wiki,就认为asynchronous IO和non-blocking IO是一个东西。这其实是因为不同的人的知识背景不同,并且在讨论这个问题的时候上下文(context)也不相同。所以,为了更好的回答这个问题,先限定一下本文的上下文。
本文讨论的背景是Linux环境下的network IO。
Stevens在文章中一共比较了五种IO Model:
- blocking IO
- nonblocking IO
- IO multiplexing
- signal driven IO
- asynchronous IO
由于signal driven IO在实际中并不常用,所以我这只提及剩下的四种IO Model。
再说一下IO发生时涉及的对象和步骤。
对于一个network IO (这里我们以read举例),它会涉及到两个系统对象,一个是调用这个IO的process (or thread),另一个就是系统内核(kernel)。当一个read操作发生时,它会经历两个阶段:
- 等待数据准备 (Waiting for the data to be ready)
- 将数据从内核拷贝到进程中 (Copying the data from the kernel to the process)
记住这两点很重要,因为这些IO Model的区别就是在两个阶段上各有不同的情况。
blocking IO (阻塞IO)
在linux中,默认情况下所有的socket都是blocking,一个典型的读操作流程大概是这样:
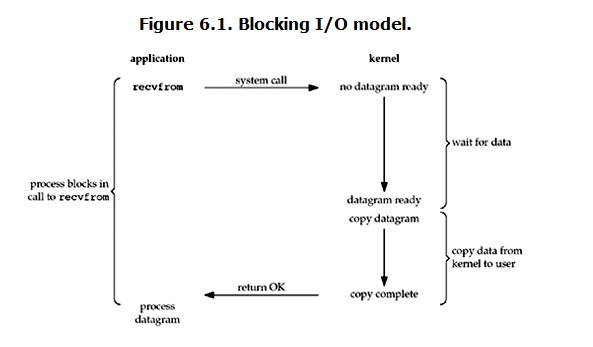
当用户进程调用了recvfrom这个系统调用,kernel就开始了IO的第一个阶段:准备数据。对于network io来说,很多时候数据在一开始还没有到达(比如,还没有收到一个完整的UDP包),这个时候kernel就要等待足够的数据到来。而在用户进程这边,整个进程会被阻塞。当kernel一直等到数据准备好了,它就会将数据从kernel中拷贝到用户内存,然后kernel返回结果,用户进程才解除block的状态,重新运行起来。
所以,blocking IO的特点就是在IO执行的两个阶段都被block了。
non-blocking IO(非阻塞IO)
linux下,可以通过设置socket使其变为non-blocking。当对一个non-blocking socket执行读操作时,流程是这个样子:
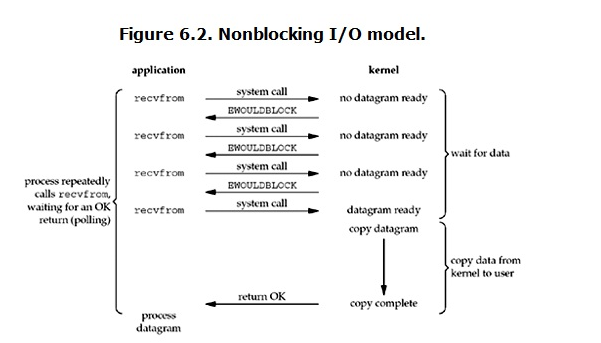
从图中可以看出,当用户进程发出read操作时,如果kernel中的数据还没有准备好,那么它并不会block用户进程,而是立刻返回一个error。从用户进程角度讲 ,它发起一个read操作后,并不需要等待,而是马上就得到了一个结果。用户进程判断结果是一个error时,它就知道数据还没有准备好,于是它可以再次发送read操作。一旦kernel中的数据准备好了,并且又再次收到了用户进程的system call,那么它马上就将数据拷贝到了用户内存,然后返回。所以,用户进程其实是需要不断的主动询问kernel数据好了没有。
注意:
在网络IO时候,非阻塞IO也会进行recvform系统调用,检查数据是否准备好,与阻塞IO不一样,”非阻塞将大的整片时间的阻塞分成N多的小的阻塞, 所以进程不断地有机会 ‘被’ CPU光顾”。即每次recvform系统调用之间,cpu的权限还在进程手中,这段时间是可以做其他事情的,
也就是说非阻塞的recvform系统调用调用之后,进程并没有被阻塞,内核马上返回给进程,如果数据还没准备好,此时会返回一个error。进程在返回之后,可以干点别的事情,然后再发起recvform系统调用。重复上面的过程,循环往复的进行recvform系统调用。这个过程通常被称之为轮询。轮询检查内核数据,直到数据准备好,再拷贝数据到进程,进行数据处理。需要注意,拷贝数据整个过程,进程仍然是属于阻塞的状态。
1 | import time |
优点:能够在等待任务完成的时间里干其他活了(包括提交其他任务,也就是 “后台” 可以有多个任务在同时执行)。
缺点:任务完成的响应延迟增大了,因为每过一段时间才去轮询一次read操作,而任务可能在两次轮询之间的任意时间完成。这会导致整体数据吞吐量的降低。
IO multiplexing(IO多路复用)
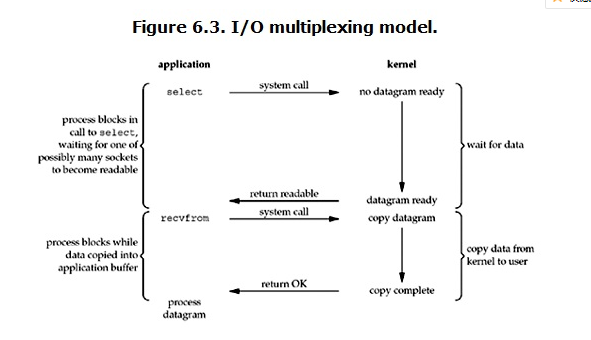
IO multiplexing这个词可能有点陌生,但是如果我说select,epoll,大概就都能明白了。有些地方也称这种IO方式为event driven IO。我们都知道,select/epoll的好处就在于单个process就可以同时处理多个网络连接的IO。它的基本原理就是select/epoll这个function会不断的轮询所负责的所有socket,当某个socket有数据到达了,就通知用户进程。它的流程如图:
IO多路复用实现机制
win :select
linux : select(效率最低) poll epoll
select
当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
这个图和blocking IO的图其实并没有太大的不同,事实上,还更差一些。因为这里需要使用两个system call (select 和 recvfrom),而blocking IO只调用了一个system call (recvfrom)。但是,用select的优势在于它可以同时处理多个connection。(多说一句。所以,如果处理的连接数不是很高的话,使用select/epoll的web server不一定比使用multi-threading + blocking IO的web server性能更好,可能延迟还更大。select/epoll的优势并不是对于单个连接能处理得更快,而是在于能处理更多的连接。)
在IO multiplexing Model中,实际中,对于每一个socket,一般都设置成为non-blocking,但是,如上图所示,整个用户的process其实是一直被block的。只不过process是被select这个函数block,而不是被socket IO给block。
结论: select的优势在于可以处理多个连接,不适用于单个连接
select的缺点:
1.每次调用select都要将所有别的fd(文件描述符)拷贝至内核空间,导致效率下降
2.遍历所有的fd,是否有数据访问(最重要的问题)
3.最大连接数比较少
1 | import socket |
poll
最大连接数没有限制
epoll
最大连接数没有上限
select是通过一个函数来实现,而epoll需要三个;
1.第一个函数:创建epoll句柄:将所有别的fd(文件描述符)拷贝至内核空间,但是只需拷贝一次
2.回调函数:某一个函数或者某一个动作成功完成后会自动触发的函数,为所有的fd(文件描述符)绑定一个回调函数,一旦有数据访问,触发该回调函数,回调函数将fd放到链表中;
3.第三个函数:判断链表是否为空
Asynchronous I/O(异步IO)
linux下的asynchronous IO其实用得很少。先看一下它的流程:
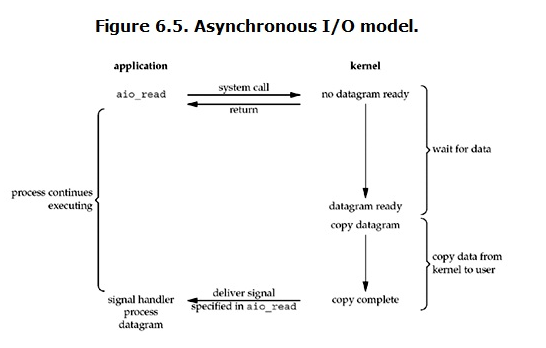
用户进程发起read操作之后,立刻就可以开始去做其它的事。而另一方面,从kernel的角度,当它受到一个asynchronous read之后,首先它会立刻返回,所以不会对用户进程产生任何block。然后,kernel会等待数据准备完成,然后将数据拷贝到用户内存,当这一切都完成之后,kernel会给用户进程发送一个signal,告诉它read操作完成了。
IO模型比较分析
到目前为止,已经将四个IO Model都介绍完了。现在回过头来回答最初的那几个问题:blocking和non-blocking的区别在哪,synchronous IO和asynchronous IO的区别在哪。
先回答最简单的这个:blocking vs non-blocking。前面的介绍中其实已经很明确的说明了这两者的区别。调用blocking IO会一直block住对应的进程直到操作完成,而non-blocking IO在kernel还准备数据的情况下会立刻返回。
在说明synchronous IO和asynchronous IO的区别之前,需要先给出两者的定义。Stevens给出的定义(其实是POSIX的定义)是这样子的:
A synchronous I/O operation causes the requesting process to be blocked until that I/O operationcompletes;
An asynchronous I/O operation does not cause the requesting process to be blocked;
两者的区别就在于synchronous IO做”IO operation”的时候会将process阻塞。按照这个定义,之前所述的blocking IO,non-blocking IO,IO multiplexing都属于synchronous IO。有人可能会说,non-blocking IO并没有被block啊。这里有个非常“狡猾”的地方,定义中所指的”IO operation”是指真实的IO操作,就是例子中的recvfrom这个system call。non-blocking IO在执行recvfrom这个system call的时候,如果kernel的数据没有准备好,这时候不会block进程。但是,当kernel中数据准备好的时候,recvfrom会将数据从kernel拷贝到用户内存中,这个时候进程是被block了,在这段时间内,进程是被block的。而asynchronous IO则不一样,当进程发起IO 操作之后,就直接返回再也不理睬了,直到kernel发送一个信号,告诉进程说IO完成。在这整个过程中,进程完全没有被block。
各个IO Model的比较如图所示:
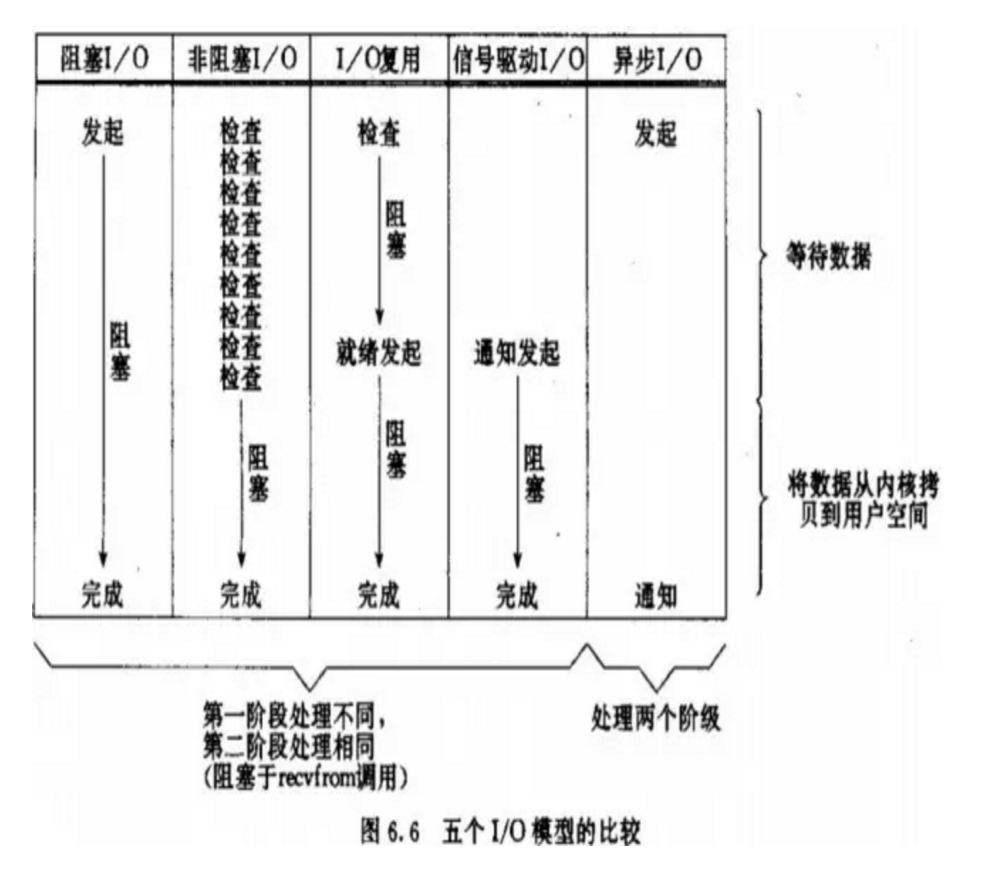
经过上面的介绍,会发现non-blocking IO和asynchronous IO的区别还是很明显的。在non-blocking IO中,虽然进程大部分时间都不会被block,但是它仍然要求进程去主动的check,并且当数据准备完成以后,也需要进程主动的再次调用recvfrom来将数据拷贝到用户内存。而asynchronous IO则完全不同。它就像是用户进程将整个IO操作交给了他人(kernel)完成,然后他人做完后发信号通知。在此期间,用户进程不需要去检查IO操作的状态,也不需要主动的去拷贝数据。
IO模型
1 阻塞IO:全程阻塞
2 非阻塞IO:
发送多次系统调用;优点:wait for data时无阻塞
缺点:1 系统调用太多 2 数据不是实时接受的 两个阶段:wait for data:非阻塞 copy data :阻塞
3 IO多路复用(监听多个连接)
sock::sock <socket.socket fd=224, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=(‘127.0.0.1’, 8800)>
对于文件描述符(套接字对象):
1 是一个非零整数,不会变
2 收发数据的时候,对于接收端而言,数据先到内核空间,然后copy到用户空间,同时,内核空间数据清除。
特点:
1 全程(wait for data,copy)阻塞
2 能监听多个文件描述符
3 实现并发
4 异步IO
全程无阻塞
总结:
同步: 阻塞IO 非阻塞IO io多路复用异步: 异步IO
selectors模块
1 | import selectors # 基于select模块实现的IO多路复用,建议大家使用 |